- 免费定制方案
- 免费提供咨询服务
电气精益调试系统
电气精益调试系统(机器人伺服电机调试工作站),采用3公斤机器人的标准控制系统,配备与3公斤机器人相同的伺服电机和等效的负载惯量,并配有相应的防护措施,既保证学生能完成和3公斤机器人相同的伺服调试工作,又可避免学生初学阶段造成的对机器人本体及学生人身的伤害。

特点:
- 脱离实物本体进行编程示教,保证安全作业
- 配合仿真软件可真实体验机器人编程和示教的效果,提高学生的参与性
- 可以开展机器人正逆解研究
- 可开展其他类型设备的运动学研究
实验内容:
- 伺服电机控制系统认知;
- 数字量IO控制与编程;
- 机器人运动学参数配置;
- 机器人示教与编程;
- 机器人坐标系;
- 机器人参数设定;
- 机器人示教学习;
- 运动控制系统开发;
- IEC61131-3标准学习;
- 运动学算法研究;
- 多种设备模型的控制与研发;
- 设备远程监控与故障诊断;
- 工业互联网实训。
机器人拆装工作站采用改进版3公斤机器人,改良了连接件之间的工艺方法,能保证多次拆装后的产品性能,便于学生了解机器人的整个组成部分,包括伺服电机,减速机,机械臂等部件及其安装方法。工作站配套有完整的引导式拆装指导文件,学生可以完成机器人内部组成认知和装配技能。

实验内容:
- 机器人各关节组成部分拆装;
- 机器人伺服电机、减速机种类和特点学习;
- 机器人各部件之间的装配方法和装配工具认知;
- 机器人机械装配过程中清洁、润滑、防护等工艺技能;
- 机器人各部件之间装配过程的检测评价方法。
电气拆装及线束检测系统
电气拆装及线束检测系统包括电气拆装和线束检测两个部分。电气拆装部分主要针对机器人的电控柜,采用与真实机器人相同的电控柜布局。电控柜中的电控元件采用真实电路模拟器件替代,接线定义与真实电控柜一致。线束检测部分是与电气拆装连接、配合,与电气拆装系统连接、配合,可以实现对电控柜中电气接线进行检测。电控柜分前面板和后面板,包括GUC-ECAT 控制器、开关电源、远程IO模块。

特点:
1、内部电气元件采用模拟器件,防止学生误操作带来的故障;
2、作业场景与真实电控柜一致,保证教学现场的真实性;
3、故障线路提醒显示;
4、可以模块化分区检测,提高检测效率;
5、手动检测与自动检测切换。
实验内容:
- 机器人电控柜电气拆装训练;
- 电气接线故障排除;
- 接线工具的使用。
机器人标定系统
在工业领域,为保证设备和生产产品的一致性和稳定性,工业设备生产出来必须进行校准标定。随着设备使用年限的增加,零件的磨损和老化,温差变化,机械参数和精度会发生变化,此时设备的重新标定是非常必要的。
机器人标定是根据目前工业机器人生产和使用的需要设计的产品。它可以完成对陌生机器人本体的参数辨识,将各个关节的参数提取给用户,用户可以根据参数完善本体或者进行算法研究。 根据不同误差类型的模型,机器人标定可以分为三个不同应用。
1、关节误差标定。机器人标定只是针对轴关节的偏移建立了实际值与出厂值之间的误差模型;
2、运动学标定。需要考虑整个机器人几何模型,包括关节角度的偏移、臂长精度等;
3、非运动学标定。用于建立包括几何模型外的参数多种模型,如关节惯量、摩擦系数、减速比误差等。

实验内容:
- 机器人误差引入分析;
- 机器人标定原理;
- 重复定位精度测量;
- 轨迹精度测量;
- 固定点接近法标定;
- 拉线编码器标定。
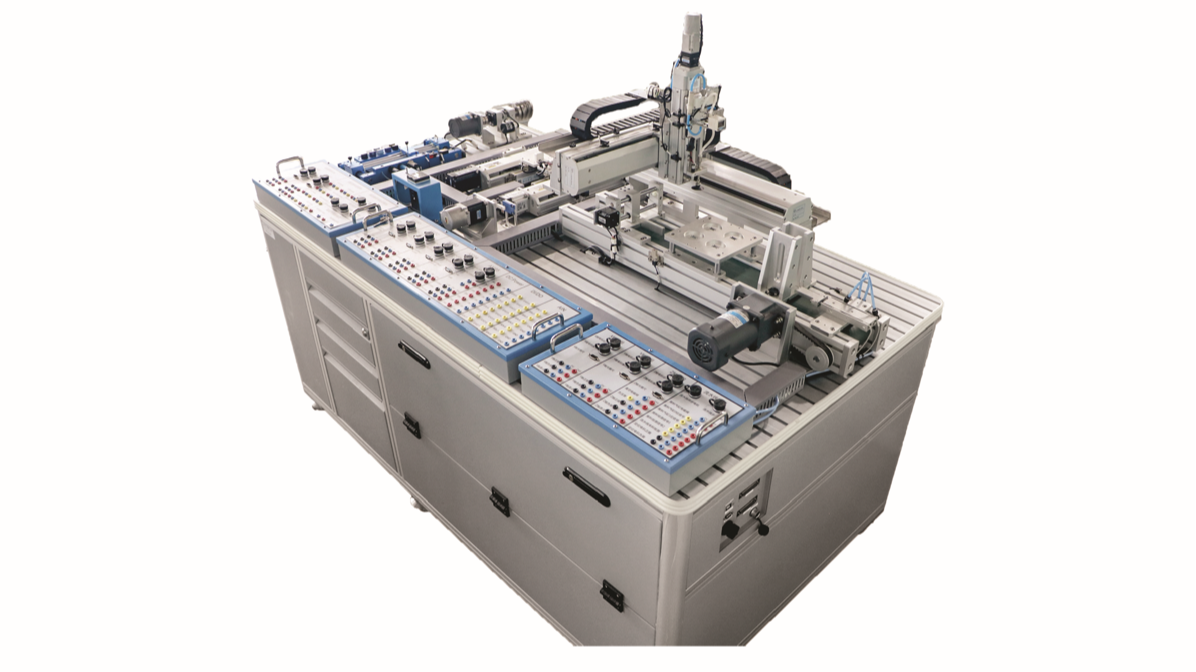
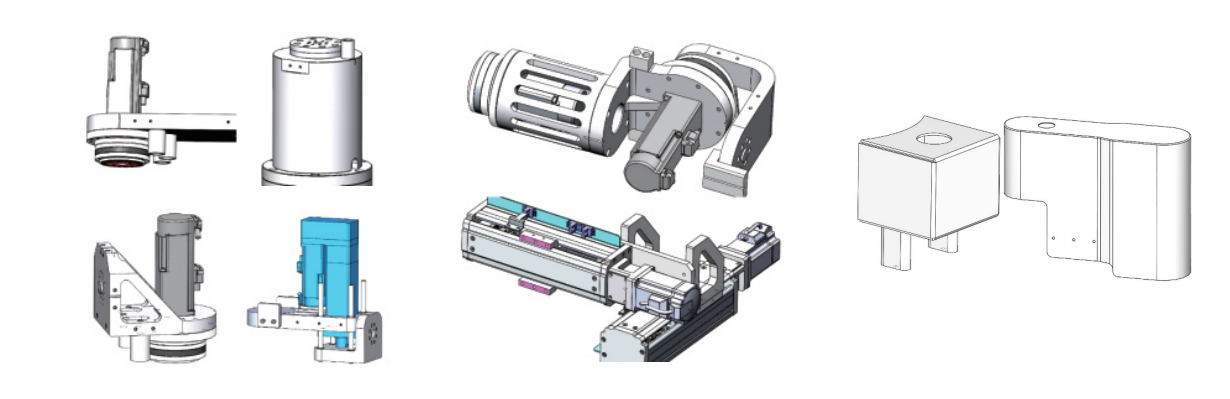
机器人重构工作站
机器人重构工作站是面向智能制造行业和高等院校开发的机器人可拆装平台,采用模块化设计思想和工业化制造标准设计制造。工作站可安装为四种模式,分别是串联六自由度机器人、四自由度Scara机器人、直角坐标机器人和双轴变位机构。产品配套工业机器人系统,能满足六轴机器人、Scara机器人等的实验要求,用户可根据教学实验需求,动态配置相关实验模块。机器人重构工作站可灵活装配机械结构,极大方便了用户的教学实验和研究工作。
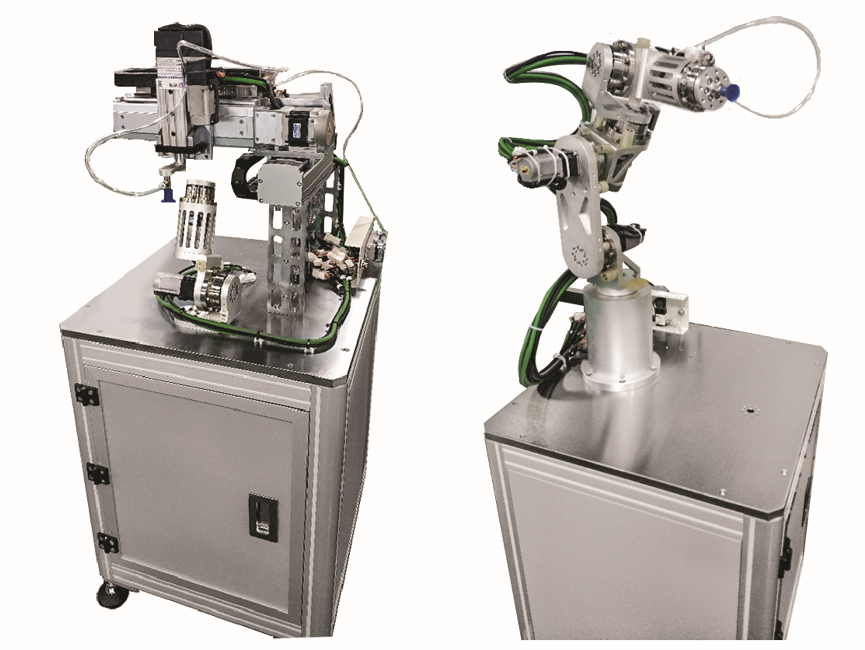
机器人重构工作站的两种模式
各重构模块:
实验内容:
- 机器人拆装实验;
- 机械模块装配实验;
- 机器人坐标系;
- 机器人参数设定;
- 机器人示教学习;
- 机器人正逆运动学研究;
- IO控制。
产品列表:
名称 | 型号 | 描述 |
电气精益调试系统 | GGHP-06 | 工业机器人系统、学习工作台、6轴绝对值伺服电机,6个减速器及负载惯量块 |
机器人拆装工作站 | GGHP-02 | 3kg负载机器人、工作台、工具车 |
电气拆装及线束检测系统 | GGHP-03 | 6轴机器人电气柜装配,电气柜安装线路检测 |
机器人标定系统 | GRPD-Gibbon2 | 机器人轨迹精度标定,支持串联六轴及SCARA |
机器人重构工作站 | GGHP-05 | 支持串联六轴、Scara、直角坐标、双轴变位机构 |