- 免费定制方案
- 免费提供咨询服务
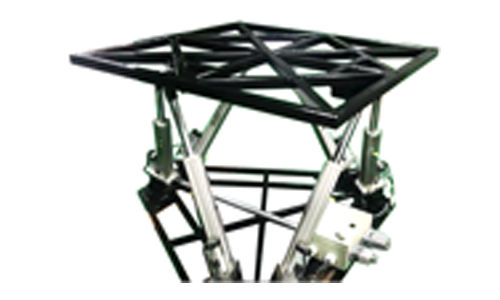
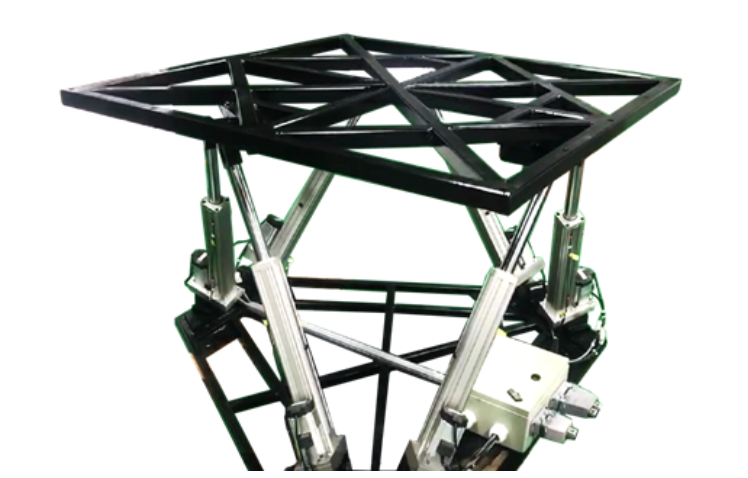
Stewart六自由度振动控制平台
选型及规格参数:
型号 | 名称 | 描述 |
GPD-AG-Stwd-100 | 六自由度振动控制平台 | 运动控制器,含Matlab/Simulink示例程序及理论分析说明指导手册 |
Stewart并联机器人 | |
项目 | 参数 |
机器人模型 | 并联六关节 |
末端负载 | 50kg |
最大工作空间 | 俯仰角:±21° 侧倾角:±22° 偏航角:±25° |
电动缸 | DMC61系列,折返式 |
伺服电机 | 松下400W,带刹车,MSMF042L1T2 |
电机驱动器 | 松下,MBDLT25SF,带X2接口 |
备注: 详细参数请电询。
实验内容:
- Stewart机器人操作认知;
- Stewart机器人参数意义;
- Stewart机器人硬件结构测试实验;
- Stewart机器人前向运动学分析;
- Stewart机器人逆向运动学分析;
- 精确定位实验。
相关推荐