三自由度直升机是一款非常有趣的教学产品,学生可以把控制直升机飞行姿态和速度算法运用到该平台上,来实际验证算法的控制效果。
自动控制原理实验箱采用半实物仿真的方式实现对自动控制原理的理解。半实物仿真是把数学模型、实体模型和系统的实际设备联系在一起,组成仿真系统。
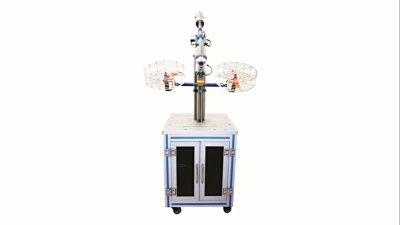
四旋翼飞行仿真器是四输入三输出的系统。四输入分别为前、后、左、右四个电机的电压;三输出分别为俯仰角、滚动角、偏航角
自平衡小车是一个自由移动的三自由度倒立摆系统,可以实现本体前后移动、前后俯仰、左右转向偏航三种运动模式。
视觉与伺服系统是装备智能化的必要基础技术,该平台是机器视觉与控制技术在工程领域结合的典型模型。
iCube理论上是一个二阶的倒立摆,其对控制模型的要求非常高。平台适合设计、验证新的控制算法,是自动控制教学、复杂算法研究的绝佳设备。